





Le DJI Matrice 4 Enterprise redéfinit les opérations aériennes intelligentes grâce à des capteurs avancés et une technologie IA intégrée. Polyvalent et compact, ce drone excelle dans des missions...
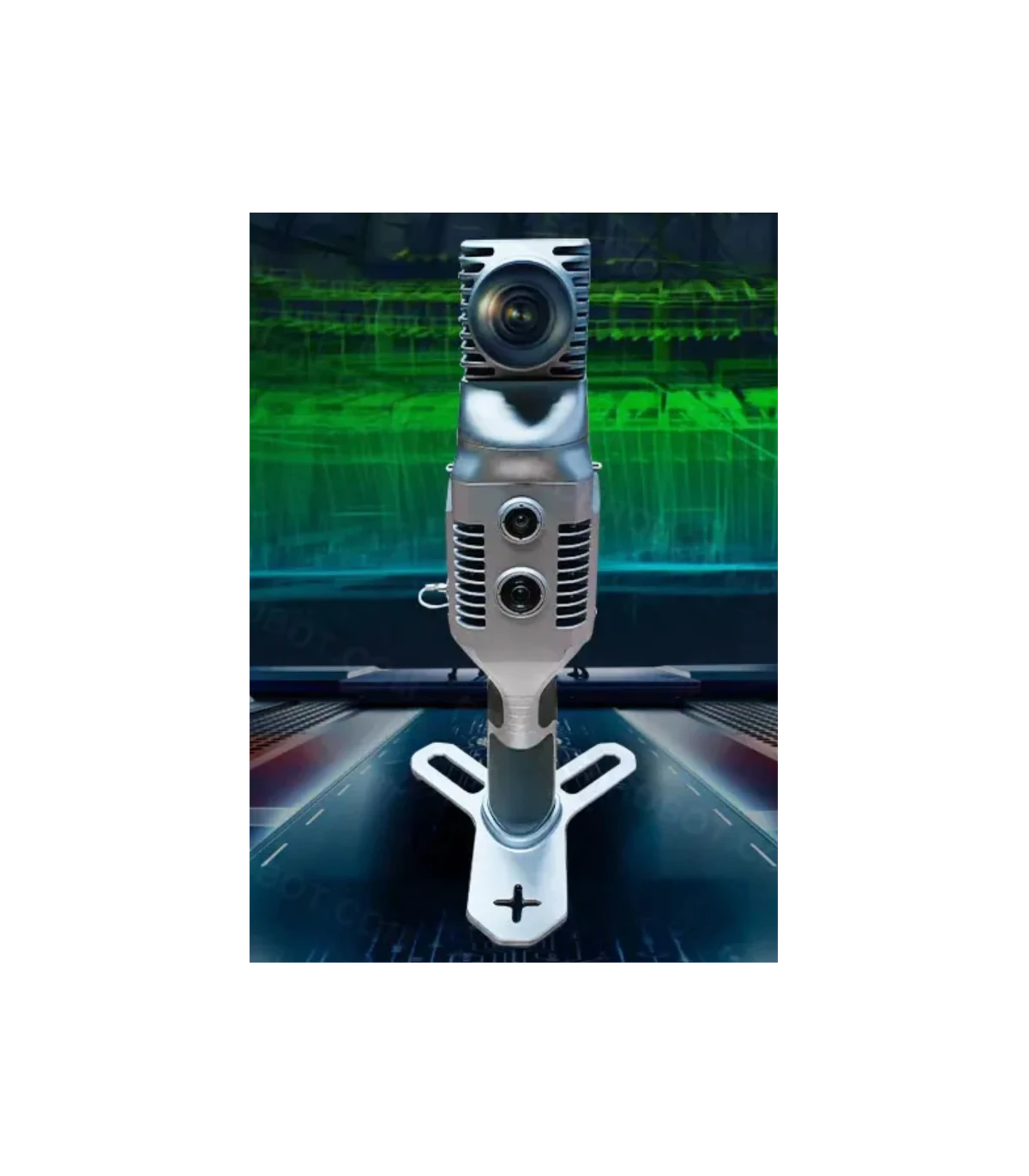
G_SLAM_LT


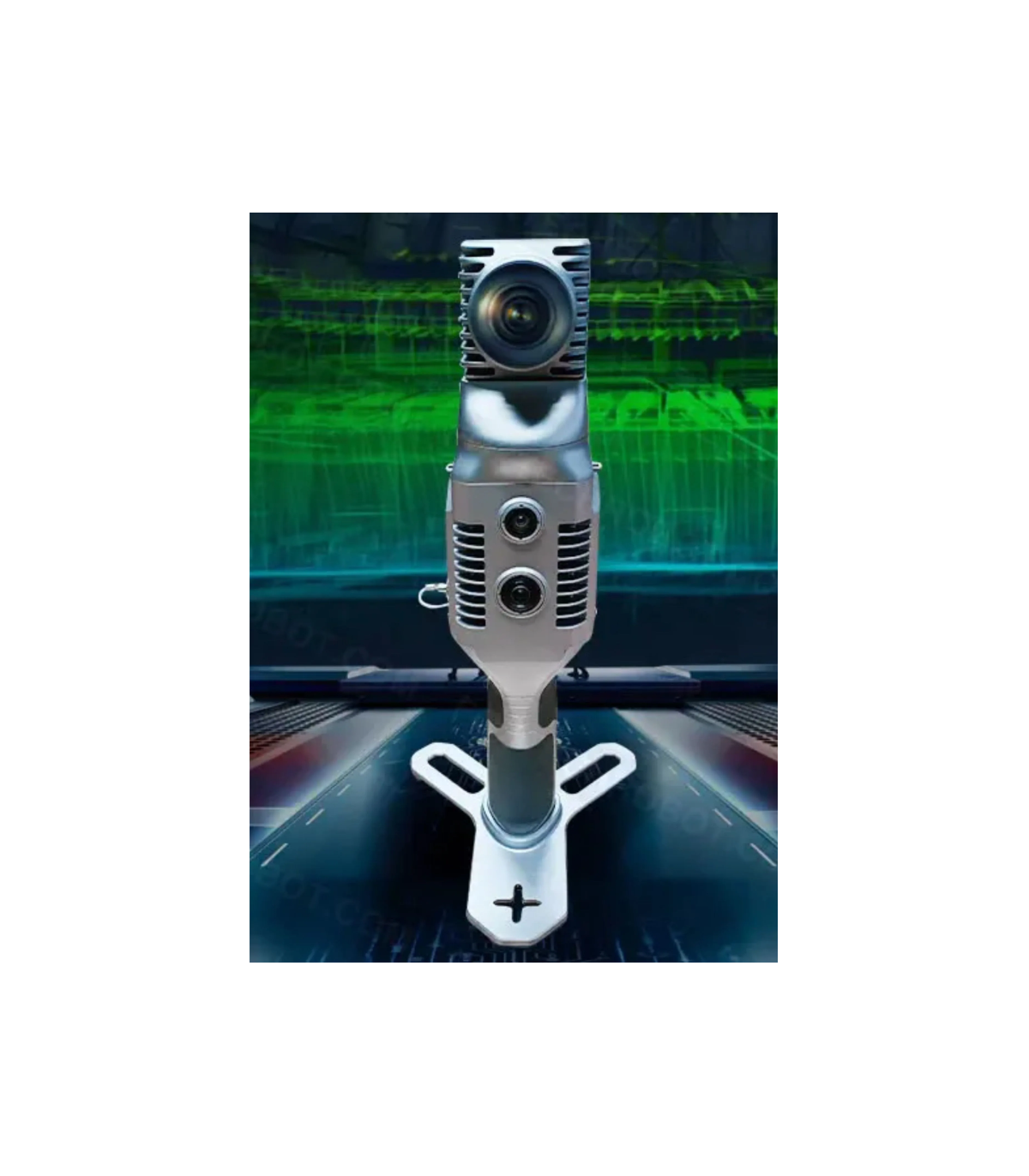
Le scanner G SLAM LT utilise un capteur laser de balayage non répétitif hémisphérique, combiné à une nacelle rotative, pour obtenir une couverture panoramique. Avec l’ajout d’une caméra et l’incorporation d’algorithmes SLAM, il améliore efficacement l’adaptabilité dans des scènes faiblement structurées pour la reconstruction 3D.
Équipé des algorithmes SLAM de niveau industriel, il atteint véritablement une adaptabilité exceptionnelle dans divers scénarios et une cartographie en temps réel de haute précision, offrant une solution efficace et précise pour les besoins de mesure 3D mobiles.
Référence:
Ajouter au comparateur0
Ajouter à la liste des favoris
Une cartographie 3D améliorée :
Le scanner est équipé d'une caméra visuelle, accompagnée d’un algorithme SLAM visuel nouvellement développé.
Cette combinaison prévient efficacement des erreurs causées par la répétition ou la non-correspondance structurelle.
Cela améliore considérablement les capacités de cartographie dans des scènes avec des caractéristiques structurelles faibles.
Le G SLAM LT est équipé d’un module informatique haute performance, permettant une cartographie en temps réel pendant la collecte de données, réalisant une capacité de « voir en avançant, obtenir ce que vous voyez ». De plus, il prend en charge non seulement les modes portatif et sac à dos, mais aussi la numérisation stationnaire basée sur un trépied, permettant l’acquisition de données de nuages de points à densité plus élevée et de haute précision pour répondre aux besoins diversifiés de différentes industries.
Produits associés

La barre de mesure éléctronique Trimble GEDO est la solution idéale pour mesurer les voies de dalles lorsqu'un chariot de mesure de voie Trimble GEDO n'est pas adapté ou que seuls quelques points...

Le logiciel de terrain Trimble® Perspective est spécialement conçu pour le contrôle du scanner sur le terrain et le recalage complet lorsque vous travaillez avec un système de scan laser 3D Trimble...

Dispositif d’aide au marquage et piquetage pour stations totales robotisées avec mini-prisme
186,00 €
(HT)
Référence: RS150M-S
Nouvelle solution innovante pour implanter rapidement, précisément et facilement des points de mesure sur des surfaces horizontales ou verticales avec des stations totale robotisées.

Main Cable 3m pour GeoSLAM GO/Revo/Revo RT
326,70 €
(HT)
363,00 €
Référence: GS_610020
Main Cable 3m pour GeoSLAM GO/Revo/Revo RT

Connectez, partagez et collaborez en toute simplicité avec Trimble Connect
Découvrez Trimble Connect, la solution ultime pour la collaboration et la gestion de projets dans le secteur de...


